principe :
Le principe est simple, par une séquence d'ordres sur une voie, on commande une sortie en tout ou rien. Cette sortie, dűment amplifiée par un MOSFET de puissance va attaquer directement une charge telle qu'un moteur SPEED 400.
La séquence d'ordre est :
- manche à fond à piquer pendant environ 0,2 sec
- suivi dans les 0,1 secondes suivantes d'un coup de manche à fond à cabrer.
Les probabilités de faux déclenchement sont filtrées par le montage. Le mouvement sur le manche est assez rapide pour ne pas (trop) perturber la trajectoire de l'avion.
Ne reculant devant aucun sacrifice, le montage inclut une fonction BEC (battery eliminated circuit). Terme barbare pour signaler que lorsque la tension de batterie du moteur (typiquement 7 éléments) passe en dessous de 6 V, le moteur sera automatiquement mis hors tension pour permettre de voler encore quelques temps en vol plané, le récepteur restant encore alimenté par le montage.
Vous pouvez également utiliser le montage pour piloter un servo en tout ou rien (ouverture de trappe pour larguer des bonbons ou autre ...)
Et, comme il me restait de la place sur les entrées sorties, je vous fournis également une sortie inversée de l'entrée ! Elle est pas belle la vie ? ;-)
liste des composants
Il va vous falloir (pour le montage complet avec BEC)
- un mcro controleur PIC 12C508 04/P ou 12C509 04/P (petite bête à huit pattes ...) et le support allant avec.
- un MOSFET canal N, niveau logique (5 V) pouvant passer environ 30 Ampère. J'utilise avec succès des IRL1104, mais tout autre IRL équivalent tel que le IRL2203 fonctionne.
- un fusible 20 A type fusible plat de voiture : INDISPENSABLE
- un régulateur 5 V à faible chute de tension: LM2937 ou LM2940
- un petit condensateur (100 nF environ)
- trois résistances de 3.3 kOhm, 10 kOhm et 33 kOhm
- une diode LED 5 Volts (ou une diode normale montée en série avec une résistance de 470 Ohm)
- une diode rapide
schéma
Commençons par le montage simpliste.
Une voie tout ou rien permettant d'allumer une LED
Le schéma de principe montre l'extręme simplicité de la réalisation :
On note que la patte GP3 doit être connectée au +5 V. Les LEDs 5 Volt n'ont pas besoin de résistance en série. Si vous utilisez des LEDs normales, mettez 470 Ohm en série.
Il permet de commander une voie en tout ou rien branchée en parallèle sur une autre voie proportionnelle. Ici la voie en tout ou rien est la LED branchée sur GP0.
Le brochage du circuit est le suivant au niveau de l'affectation des entrées sorties du PIC :
- p7 : GP0 = sortie commande ON/OFF
- p6 : GP1 = sortie servo tout ou rien (voir schéma plus bas)
- p6 : GP1 = forcé par programme à 0 (on peut brancher la LED de test entre GP2 et GP1 ça simplifie le circuit imprimé)
- p5 : GP2 = sortie LED test utilisée pour l'étalonnage du neutre
- p4 : GP3 = entrée BEC à câbler à +5V si non utilisée
- p3 : GP4 = sortie inversée (voir schéma plus bas)
- p2 : GP5 = entrée émetteur
A la mise sous tension, la LED de test s'allume. Le boot démarre par un étalonnage de la durée du neutre. Le manche doit donc être laissé au neutre pendant 3 secondes environ.
Après calcul de la durée du neutre, le manche de profondeur (si c'est la voie utilisée) doit être positionné au minimum (plein piqué) pendant 2 secondes, puis au maximum pendant deux secondes également (plein cabré) pour étalonnage de la course.
Lorsque cette manoeuvre est effectuée, la LED de test s'éteint. Il n'est pas indispensable de câbler la LED de test. Elle ne sert qu'à visualiser la séquence d'étalonnage. Si elle n'est pas câblée, il vous faut faire l'étalonnage en aveugle.
Ensuite, toute action sur le manche de type mini+maxi dans un délai très bref provoque alternativement la mise ON/mise OFF de la voie tout ou rien.
Si la voie tout ou rien est utilisée pour mettre ON un moteur et que la fonction BEC est câblée (GP3), alors, lorsque la batterie passe en dessous de 5,7 V, le moteur est coupé. C'est l'objet du schéma complet ci dessous.
Une remise ON du moteur est possible (coup de manche mini+maxi) pour tirer le maximum des accus ...
pour piloter un servo ou un variateur
Le module VOIE++ génčre également une sortie tout ou rien compatible des équipements du commerce (servos, variateurs ...) Ainsi, si vous disposez d'un variateur avec fonction BEC (soit du commerce, soit celui qu'on trouve sur mon site) vous pouvez utiliser le module VOIE++ pour commander votre moteur directement via le variateur de la façon suivante :
Pour piloter directement un moteur
Pour ceux qui ne veulent pas investir dans un variateur, passons maintenant au montage complet qui n'est guère plus compliqué :
Le circuit intégré est identique. Il est ici alimenté par un régulateur de tension faible chute qui génère un 5 V à partir de la tension batterie. Le 5 V est envoyé par le cordon servo au récepteur. Il n'y a donc pas besoin de batterie de réception.
La fonction BEC est assurée par la chaîne R1, transistor PNP et R3. Le PNP a sa base connectée au +5V. Il est passant lorsque la tension émetteur est supérieur à celle de la base d'au moins 0,7V. Lorsque la battterie se vide, sa tension devient inférieure à 5,7 V et le transistor se bloque. La tension sur GP3 passe alors d'une valeur supérieur à 3 V à 0 V ce qui permet de changer l'état logique la patte GP3. Ce principe est repris de la conception de Mike Norton sur son régulateur. (Dans une précédente version, une résistance R2 était insérée en série entre le transistor et R3, elle est inutile)
Le reste du montage se passe de commentaires. Le MOSFET sensible aux niveaux logiques (+5V) pilote directement le moteur. Une diode de roue libre (diode schottky) est connectée en inverse aux bornes du moteur.
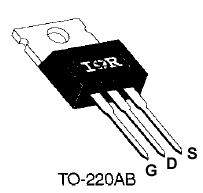
Le brochage standard des transistors MOSFET est le suivant
La gate (G) est à raccorder à la patte GP0, la source (S) va à la masse et le drain (D) est raccordé côté moteur.
joker : la sortie inversée :
Cerise sur le gateau, le montage peut (aussi) ętre utilisé comme inverseur de sens de rotation d'un servo. Le signal sur la patte GP4 est le signal servo inverse de l'entrée GP5.
Voici un exemple d'application : (avouez que c'est simple)
la réalisation
Le plus simple, c'est d'utiliser une chute de plaquette à trous. Les plus courageux feront un circuit imprimé et n'hésiteront pas à me le faire passer pour en faire profiter les copains sur le ouaibe ...
Tout ça c'est bien beau, mais où trouver le microcontroleur PIC ? Deux options :
- programmer le vôtre à partir du fichier .HEX fourni ici dans l'archive zippée, vous trouverez aussi le source C que je vous demande de ne pas commercialiser).
- me contacter pour en obtenir un programmé ...

Pour plus d'informations sur les PIC, le mieux, c'est d'aller directement chez le fabricant MICROCHIP. ou d'allr voir la page le coin du PIC sur Aeropic.
A vos fers à souder !
Une dernière précision. Si vous utilisez un moteur électrique et une hélice, attention à ce que vous faites. Bien que le montage filtre les éventuelles fausses commandes et est normalement insensible aux parasites, il est fortement conseillé de ne pas laisser vos doigts au niveau de l'hélice et de ne mettre l'hélice en place que lorsque vous serez sûr que tout fonctionne.
Le montage a été testé sur plusieurs radios, il est dérivé des circuits mixer et SOS modèles dont plusieurs dizaines d'exemplaires sont en vols dans le monde entier. Il doit donc marcher chez vous, mais, précaution d'usage, l'auteur décline toute responsabilité en cas de dommages causés à votre matériel.
Bons vols !